Générer et exploiter le nuage de points 3D d'un bâtiment

Le nuage de points d’un bâtiment : représentation 3D de la réalité

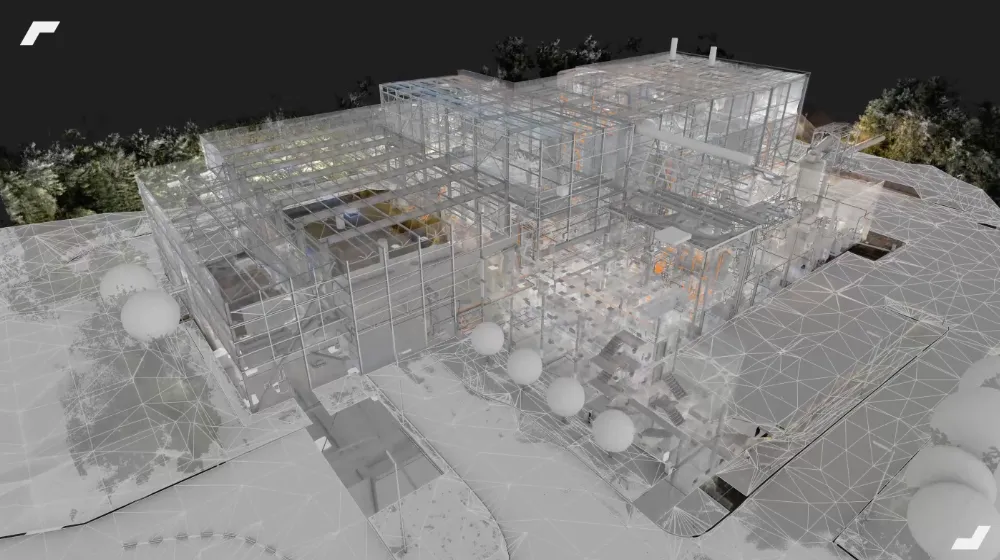
Un nuage de points est une représentation numérique 3D d'un objet ou d'un espace. Il se compose de millions de points, dont chacun est placé selon un repère de coordonnées x, y et z. Contrairement à d’autres modes de représentations 3D comme les maillages (mesh), les points du nuage ne sont pas liés entre eux.
Dans cet article, nous resterons concentrés sur le nuage de points d’espaces et d’éléments techniques du bâtiment. Pour autant, en suivant des principes d’acquisition similaires, il est possible de produire des nuages de points à d’autres échelles : de la pièce mécanique, jusqu’à celui d’une ville ou d’un territoire.

Comme illustré ci-dessus, le nuage de points d’un bâtiment est une véritable empreinte 3D d’un bâtiment et des équipements qu’il contient. En tant que représentation non modifiée ou simplifiée de la réalité, ce format est le plus adapté à la recherche de détails et à des analyses fines comme la prise de dimension ou l’analyse de planéité par exemple.
Comment générer un nuage de points ?
La lasergrammétrie à la base de l’acquisition de nuage de points
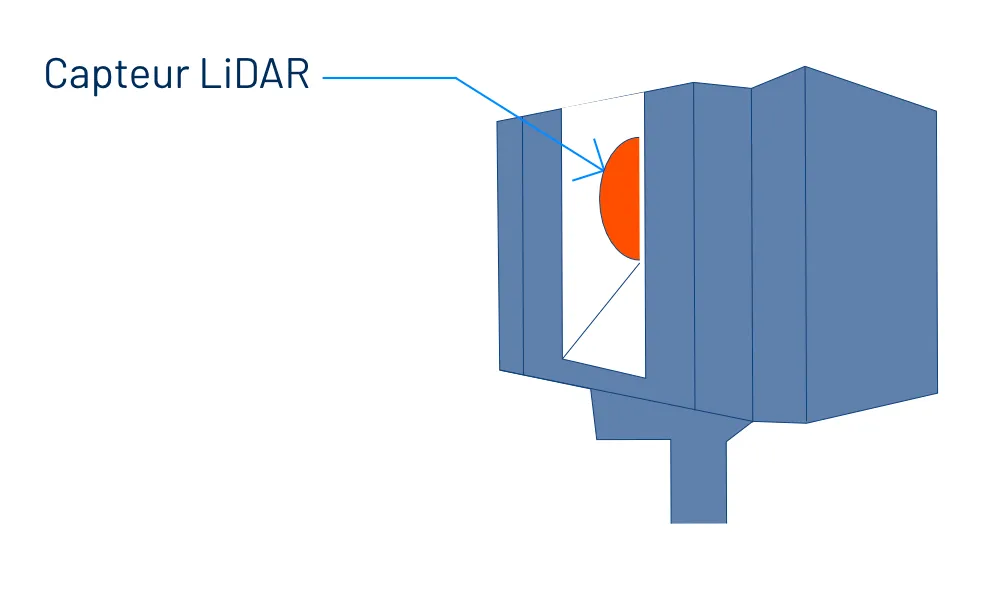
Du télémètre laser traditionnel aux nouvelles solutions d’acquisition, les systèmes de mesures reposent sur le principe de lasergrammétrie et sur l'utilisation de capteurs LiDAR, dont sont équipés les scanners 3D et certains drones.
Ces capteurs émettent un faisceau lumineux balayant horizontalement et verticalement l'environnement jusqu’à la rencontre d’obstacles (mur, sol, mobilier, machine, etc.).
La distance jusqu’à chaque obstacle est alors mesurée, afin de positionner un point dans l’espace. La répétition de ce processus lors du balayage permet alors de constituer un nuage de points brut. Le balayage du scanner vient donc échantillonner l’environnement en posant un point à chaque endroit où il aura rencontré un obstacle. La finesse de ce balayage et la portée du scanner sont basées sur la configuration choisie, définissant ensuite une certaine densité de points.
Selon la méthode d’acquisition et les capteurs utilisés, un nuage de points peut être en noir et blanc ou colorisé. Le processus de colorisation des points résulte de l’utilisation de la photo panoramique prise par le scanner.
Dans le domaine du bâtiment, les scanners terrestres (statiques et dynamiques) sont les équipements de captation les plus courants. L'utilisation de drones pour relever des façades, toitures ou ouvrages extérieurs est également une des évolutions de ces dernières années.
Acquérir un seul nuage de points brut permet rarement de couvrir un bâtiment entier, surtout lors de l’utilisation d’un scanner terrestre statique. Il s’agira alors de recaler et d’assembler plusieurs nuages de points.
Acquisition et assemblage de nuage de points au scanner statique
Solutions de relevé les plus répandues, les scanners statiques permettent de générer des nuages de points particulièrement denses. Montés sur trépied et dotés d’un unique capteur LiDAR, ces scanners permettent de numériser un environnement « station par station », chaque station étant une position fixe où le scanner (monté sur trépied) balaye l’environnement sur environ 320°.

Un nuage de points est donc généré pour chacune des stations, l’ensemble des nuages doivent ensuite être « recalés » entre eux. Ce recalage peut s'opérer :
- par recouvrement, via la méthode ICP (Iterative Closed Point) qui analyse la distance entre les points de deux nuages pour estimer les meilleures transformations et alignements possibles ;
- par le placement de cibles et sphères posées dans l’environnement lors de la captation, qui permettent d’optimiser la consolidation lorsque l’environnement possède peu d’éléments géométriques caractéristiques
Acquisition et assemblage de nuage de points au scanner dynamique
À la différence des scanners statiques, les scanners mobiles (ou dynamiques) permettent de numériser l’environnement tout en se déplaçant. Ce principe de captation en mouvement est permis par deux éléments :
- Un système de localisation par cartographie simultanée (SLAM) permettant au scanner de se situer dans l’espace ;
- Une centrale inertielle (IMU), analysant les mouvements et déplacements du scanner pour estimer son orientation et sa vitesse linéaire.
Le nuage de points capté couvre donc une zone entière, dans laquelle l’opérateur s’est déplacé avec le scanner en :
- couvrant toute la zone d’un point de vue surfacique ;
- contournant les objets (ex : mobilier) et éléments de structures (ex : piliers) de la zone afin d’en obtenir une numérisation complète.

Chaque nuage de points représente donc une zone définie du bâtiment que l’opérateur aura choisi de parcourir. Il s’agira ensuite d’assembler chaque nuage de points. Pour cela, des cibles communes à plusieurs nuages de points devront être relevées.
Les coordonnées de ces cibles peuvent également être relevées par une station totale et être injectées dans le post-traitement pour faciliter l’assemblage des nuages de points et corriger les dérives liées au SLAM.

Les nuages de points issus des scanners statiques et dynamiques peuvent également être recalés ensemble en suivant ces principes. C'est exactement la démarche de notre protocole de scan 3D multi-technologies, dont la mise en place permet de tirer parti des avantages de chaque solution.
Les formats de fichiers de nuage de points
Il existe de multiples formats de fichiers de nuage de points, parmi les plus connus, nous pouvons par exemple nommer :
- OBJ : le format adopté par une large gamme d'applications comme Bentley Systems, RealityCapture et Trimble.
- PLY : inspiré par OBJ et spécialement conçu pour stocker des données 3D. PLY est un format de fichier capable de représenter la couleur, la transparence, les normales de surface, la texture et les coordonnées des données.
- LAS : un des formats standards de l'industrie, largement utilisé et compatible avec la plupart des programmes.
- PCG, RCS, RCP : des formats de fichiers développés par Autodesk adaptés à leur suite logicielle.
- E57 : format de fichier indépendant permettant de stocker les données d’un nuage de points et d’autres métadonnées produites par les scanners laser. Ce type de format est devenu un des formats majoritairement utilisés ces dernières années.
Capturer un nuage de points 3D, un premier pas vers une multitude d’usages
De premiers cas d’usages basiques
Un nuage de points, même brut, permet déjà une multitude d’usages. En effet, par l’intermédiaire de logiciels spécialisés (comme Cyclone, 3DR, Scene ou Realworks), un nuage de points est une représentation complète et précise du bâti dans laquelle rechercher des informations. Par informations, nous faisons ici référence aux inspections (recherche de détails, analyses de surfaces, etc.) pouvant être menées dans une scène 3D, ou à la possibilité de prendre des côtes, surfaces et dimensions dans celle-ci.
Ne serait-ce que par ces deux premiers cas d’applications, les aller-retours sur un site sont déjà réduits, et les doutes concernant la réalité du terrain constamment levés ! Au-delà de la manipulation de ce nuage de points brut, celui-ci s’avère être une base fiable afin de créer et de mettre à jour d’autres données spatiales d’un projet (plans 2D et maquette numérique notamment).
Dessiner un plan 2D sur la base du nuage de points
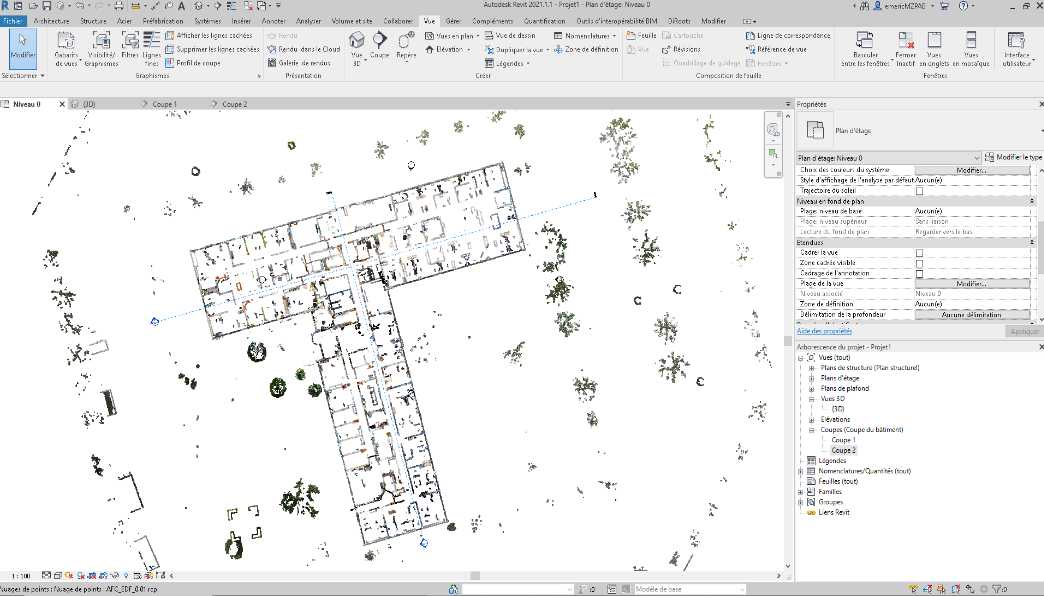
Depuis un nuage de points, il est possible d’isoler des coupes horizontales et verticales dans le nuage, permettant ainsi la création de coupes, de profils ou des vues en 2D. Ces coupes peuvent ensuite être exploitées pour dessiner différentes géométries 2D (plans du bâtiment au format DWG, plans d’élévations, plans de charpente, plans de plafond, etc.) via des logiciels métiers comme AutoCAD. Les plans 2D dessinés ou mis à jour sont donc produits sur une empreinte du réel particulièrement précise.
Scan to BIM : du nuage de points à la maquette BIM
Comme nous le détaillons dans cet article sur le « scan to bim », le nuage de points peut servir de calque de modélisation 3D d’un bâtiment.
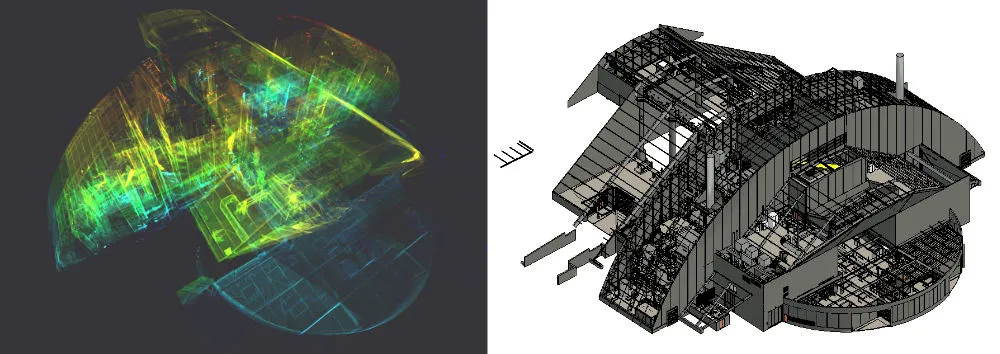
Cette méthode permet de modéliser un bâtiment plus rapidement, et de se baser sur une empreinte de la réalité particulièrement fiable pour tendre vers une maquette « as-built » du bâti (tel que construit).
Détection de clash et mise à jour d’une maquette numérique 3D / BIM
Il est de plus en plus fréquent pour les bureaux d’études, architectes et maîtrises d'ouvrage de bénéficier d’une maquette numérique du bâtiment dès le début d’un projet.
De la maquette de conception initiale à la maquette « As-Built » du bâtiment, celle-ci est amenée à évoluer. Sa tenue à jour peut alors être remise en question. Il s’agira donc de vérifier les différences entre la maquette et le réel pour converger vers une maquette « as-built »
Pour cela, des logiciels tels que Navisworks ou Autodesk permettent d’insérer le nuage de points (faisant office de référentiel spatial à jour du bâtiment) dans la maquette numérique existante.
Ainsi, il devient possible de détecter les différences (appelées « clash ») entre ces deux entités, l’une étant une représentation du réel, et l’autre le modèle géométrique vers lequel on souhaite tendre. Cette méthode présente deux principaux avantages :
- pouvoir mettre à jour la maquette numérique de conception en suivant l’évolution du chantier ;
- détecter d’éventuels conflits et réagir avant que ces derniers n’engendrent des surcoûts importants.
Réalité virtuelle et nuage de points 3D
Finalement, un nuage de points 3D peut être utilisé dans des usages de réalité virtuelle, notamment pour mener des simulations d’aménagement par exemple. Il est alors utilisé comme support brut dans lequel supprimer et ajouter des objets 3D ou de « croper » et déplacer des parties du nuage de points initial.
Concrètement, cela permet par exemple de sélectionner une machine et de la déplacer dans son environnement pour en définir son nouvel emplacement.
Vers une démocratisation de la capture de la réalité ?
Alors que les solutions de scan mobiles ont déjà démocratisé la Reality Capture grâce à la rapidité de captation qu’elles proposent, de nouvelles solutions émergent et devraient accélérer cette démocratisation.
Parmi celles-ci, nous pouvons citer le récent BLK2FLY, le premier « scanner laser volant autonome » de Leica Geosystem. Ou encore, la récente collaboration de Leica avec Boston Dynamics, présentant une autre solution de capture autonome, mais cette fois-ci terrestre !
Pour contrebalancer l’impact potentiel de ces avancées, n’oublions pas qu’une multitude de problématiques opérationnelles ne peuvent aujourd’hui être gérées que par des opérateurs présents sur le terrain.
Ainsi, ces solutions pourraient marquer une avancée sur l’automatisation de la mise à jour des données 3D d’un bâtiment, sans pour autant remplacer une capture initiale souvent trop complexe.
Pour en savoir plus
- Vercator : What are the most common 3D point cloud file formats and how to solve interoperability ?
- Scan 3D, définition et usages dans le bâtiment
- La théorie du principe ICP (Iterative Closest Point)
- Quelles solutions de scan choisir pour son projet ?
- Quelles sont les étapes clés d'un projet de scan 3D ?
Étudions ensemble votre projet
Chaque projet commence par une bonne compréhension de vos besoins. Contactez-nous et nous étudierons votre projet pour vous établir un devis dans les meilleurs délais.
Nous contacter





Pour ne rien manquer de nos actualités, abonnez-vous dès maintenant à notre newsletter !
Recevez des nouvelles chaque quadrimestre directement dans votre boîte mail, pour rester informé des dernières actualités et événements chez My Digital Buildings.


